
Процесс распознавания полосы движения
Процесс распознавания полосы движения
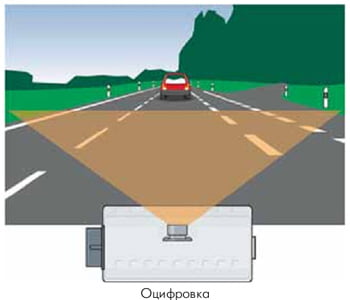
Все входящие цифровые изображения, фиксируемые камерой, проверяются процессором ассистента движения по полосе практически в реальном времени на наличие резкого изменения градации серого, вызванного, например, появлением белой разделительной полосы на тёмном асфальтовом покрытии.
Для уменьшения времени выполнения вычислительных операций ассистент движения по полосе при анализе изображений ограничивается двумя трапециевидными зонами в левой и правой половине изображения, в которых и ожидается появление дорожной разметки. Кроме того, анализируется не каждая из 480 строк, а лишь выборочные строки в пределах области поиска.
Такой метод в совокупности с большой вычислительной мощностью блока позволяет выполнять досточно быстрый аналаз с целью распознавания полосы движения даже при высокой скорости.
Если программа анализа обнаруживает в одной из выбранных строк резкое изменение одной или нескольких градаций серого, то система отмечает эти места индикаторными или маркировочными точками.
В одной строке может быть несколько маркировочных точек. Для расчёта полосы движения автомобиля используются только те внутренние точки, которые, повторяясь от строки к строке, позволяют построить из них непрерывную виртуальную линию, соответствующую реальной дорожной разметке полосы движения или границе дорожного полотна.
При наличии достаточного количества маркировочных точек, которые соединяются в непрерывную линию, ассистент движения по полосе на основе обнаруженных маркировочных точек рассчитывает фактическую траекторию полосы движения. Исходя из распознанной полосы движения, ассистент движения по полосе с учётом внутренних функциональных границ и пределов безопасности формирует виртуальную полосу движения.
Теперь с помощью полученных видеоданных, аналогично системе глонасс ассистент движения по полосе рассчитывает ориентацию автомобиля относительно виртуальной полосы движения. Если автомобиль приближается к границе или выезжает за пределы виртуальной полосы движения, то ассистент движения по полосе выполняет корректирующее подруливание.
При незначительных изменениях градаций серого на цифровом изображении или при невозможности задать достаточное количество маркировочных точек, по которым система может рассчитать траекторию дороги, ассистент движения по полосе переключается в пассивный режим работы, в котором предупреждение и корректирующее подруливание не выполняются. Тем не менее, он продолжает анализировать входящие изображения, чтобы активироваться сразу, как только появится возможность однозначного распознавания границ проезжей части.