
Поиск подходящего свободного места на стоянке
Поиск подходящего свободного места на стоянке
Измерение размеров подходящего свободного места на парковке осуществляется при помощи ультразвуковых датчиков, расположенных по обеим сторонам автомобиля.
В нашем примере измерение проводит передний правый датчик парковочного автопилота (правая сторона автомобиля).
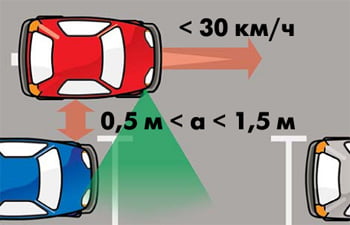
Для проведения измерения свободного места на парковке скорость автомобиля не должна превышать 30 км/ч. На скорости от 30 до 45 км/ч датчики парковочного автопилота отключаются. В этом случае система переходит в режим Stand#by, поскольку считает, что процесс поиска прерван и будет продолжен в другом месте.
Полезное: Если вы ищите мини погрузчики, рекомендуем посетить сайт mpogruzchiki.ru. Компания предоагает GiANT kniklader — универсальные шарнирно-сочленненые мини погрузчики.
При скорости движения выше 45 км/ч парковочный автопилот отключается полностью, при необходимости его следует активировать заново.
Когда скорость движения становится ниже 30 км/ч, а расстояние до припаркованных автомобилей составляет от 0,5 до 1,5 м, парковочный автопилот начинает поиск подходящего места для парковки на правой стороне дороги. Результат измерения отображается на дисплее в комбинации приборов появляется стилизованное изображение автомобиля и края дороги.
Если в процессе поиска свободного места на парковке система регистрирует, что угол между осью автомобиля и бордюром или линией припаркованных автомобилей становится больше 20°, то парковочный автопилот считает, что, возможно, водитель намеревается повернуть на другую улицу, и прерывает процесс поиска.
Для определения величины угла прохождения парковочный автопилот может исследовать и сравнивать с осью автомобиля разные линии:
1. Линию, образованную припаркованными автомобилями
2. Бордюр
3. Стены домов или заборы
Для анализа используется лишь ближайшая к автомобилю линия. Это помогает избежать ошибочной оценки, если, например, бордюр и стены домов расположены не параллельно.